Raw (L0)
Product description
The L0 Product is the rawest product from Satellogic’s products family. It is composed by the raw frames coming directly from the sensor of the payloads without any modification or processing, along with the necessary metadata. The frames are simple packaged in a standardized format to create the L0 product. The units of each raster are in DNs directly from the sensor.
Given the nature of our payload design and operations, the L0 product is a set of overlaping frames, each with 4 areas corresponding to each of the RGBNir bands of the sensor.
There can be also a 2x (almost identical) overlap for MarkV satellites due to the HDR capture strategy
Technical characteristics
| Parameter | Mark IV |
Mark V |
|
|---|---|---|---|
| Spectral bands | Blue : 450 - 510 nm |
Blue : 450 - 517 nm |
|
| Frame size | 5120 x 5120 pix |
7000 x 9344 pix |
|
| GSD | 1.03m 1 |
0.73m 1 |
|
| Swath | 5.2 Km 1 |
6.9 Km 1 |
|
| Image bit depth | 8 bit DNs |
16 bit DNs |
|
| Algorithms applied | None |
| |
| Geolocation Accuracy | <= 300m TBC CE90 |
| |
| Image format | GeoTiff, LZW loseless compression |
| |
| Ancilliary files | Metadata (JSON), preview (PNG), and thumbnail (PNG). |
| |
Product presentation
Each of the frames is 16-bit or 8-bit single band Grayscale GeoTIFF. The GeoTiff location is coarsly defined by the onboard satellite telemetry to help with the fine location process. Each of the frames contains 4 regions, corresponding to RGBNIR as depicted in the following image:
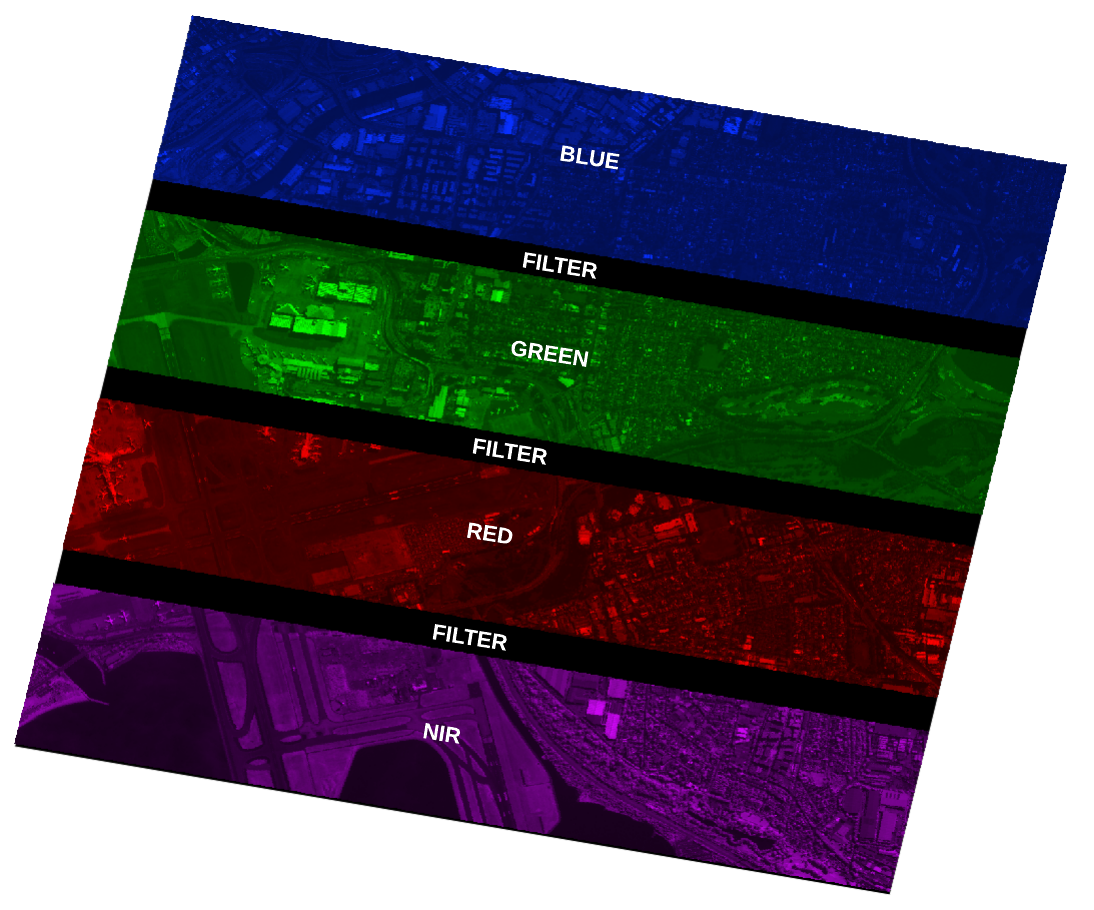
The size of each frame varies by platform beign 5120x5120 for Mark IV and 9344x7000 for Mark V.
The position of each band varies slightly between satellites and the exact position is defined in the metadata file for each frame.
Product components
Each L0 product, contains a preview, a thumbnail and a metadata file as well.
Raster, preview and thumbanil
The full resolution raster as well as downsampled versions for preview and thumbnails.


Metadata file
The Metadata file is a JSON file that contains metadata about the satellite, the payload and the capture at the moment of taking that specific frame. The following parameters are expected on a JSON metada file of an L0 product.
Assets Metadata
| Field Name | Description | Example |
|---|---|---|
| supplier | The name of the supplier of the imagery. | "Satellogic" |
| productname | The product name | "L0" |
| scene_id | The ID of the individual frame this metadata file corresponds to. | "20240902_125109_614_SN30_L0_MS" |
| sceneset_id | The UUID of the entire capture this individual frame is part of. | "f1c8eeb1-f5fc-4a17-b107-2e5174c25b68" |
| satellite_class | The satellite class this individual frame is from. | "NewSat" |
| satellite_name | The name of the satellite that took this frame. Format: newsat<N>, with N>0 | "newsat30" |
| timestamp | The timestamp of the corresponding individual frame, in ISO8601 | "2024-09-02T12:51:09.614415+00:00" |
| footprint {} | The estimated footprint of the individual frame. Each coordinate is a longitude/latitude pair. Together they define a closed loop. |
{
"type": "Polygon",
"coordinates": [
[
[20.54603184801816, 50.891245456320085],
[20.619985731541103, 50.885050659712675],
[20.602281516301147, 50.83972901918288],
[20.528327632778204, 50.84592984054603],
[20.54603184801816, 50.891245456320085]
]
]
}
|
| metadata → telemetry → estimated_error | The estimated errors of the measurements provided in this document in deg, deg, deg, m, m |
{
"payload_attitude_roll_error": 0.003702757106596987,
"payload_attitude_pitch_error": 0.004066871556403458,
"payload_attitude_yaw_error": 0.00370383974827634,
"satellite_position_error_xyz": 47,
"satellite_altitude_error": 47.2
}
|
| metadata → telemetry → payload_attitude | LVLH (“Local Vertical Local Horizontal” reference frame) to Payload. The rotation between the Payload Reference Frame and Orbit Reference. |
{
"roll": -17.462713685533394,
"pitch": -18.067429384447212,
"yaw": 86.52986737766115,
"qi": -0.21553685507321207,
"qj": -0.010262212318849226,
"qk": 0.6863838826293411,
"qr": 0.6944895368327322
}
|
| metadata → telemetry → payload_attitude_ecef | The estimated payload attitude with respect to ECEF. Roll/pitch/yaw are angles in degrees; qi/qj/qk/qr are the attitude quaternion. |
{
"roll": -156.61375353315677,
"pitch": 23.59771692117737,
"yaw": 67.4330283878286,
"qi": 0.7743188266460452,
"qj": -0.5665504480556272,
"qk": 0.056430855917892694,
"qr": -0.2761639060591265
}
|
| metadata → telemetry → satellite_attitude_calculated_ecef2body | The estimated satellite attitude with respect to ECEF. Calculated using internal tools. |
{
"qr": 0.27514077557430466,
"qi": 0.7782452895749822,
"qj": -0.5617941488731234,
"qk": 0.054946857623027784
}
|
| metadata → telemetry → body2sensor_quaternion | The satellite body to sensor quaternion (for MSI / HSI). Default identity value if calibration isn’t performed. |
{
"qr": 0.999984273632398,
"qi": -0.0012972240863929375,
"qj": 0.0009388672449488652,
"qk": 0.005374776818772846
}
|
| metadata → telemetry → satellite_altitude | The satellite altitude at the moment of the capture, in meters. | 404433.6369 |
| metadata → telemetry → satellite_nadir | The estimated Nadir point in WGS84 at the moment of the capture. |
{
"latitude": 51.726390395199196,
"longitude": 22.905864473166723
}
|
| metadata → telemetry → satellite_posvel | The position and velocity of the satellite with respect to ECEF. |
{
"pos_x": 3877487.1114285714,
"pos_y": 1638382.3979910715,
"pos_z": 5301508.870535714,
"vel_x": 6158.478503069196,
"vel_y": 540.6382928030831,
"vel_z": -4662.158263462611
}
|
| metadata → telemetry → location_calculated | The longitude/latitude/altitude of the boresight of the satellite. |
{
"latitude": 50.86553282927114,
"longitude": 20.57425280453569,
"altitude": -0.1888151979073882
}
|
| metadata → telemetry → attitude | Satellite attitude information, currently contains only the ecef2body data. |
{
"ecef2body": [
0.27514077557430466,
0.7782452895749822,
-0.5617941488731234,
0.054946857623027784
]
}
|
| metadata → telemetry → position | Satellite position information, currently contains only the gps_ecef_meter data (position with respect to ECEF). |
{
"gps_ecef_meter": [
3877487.1114285714,
1638382.3979910715,
5301508.870535714
]
}
|
| metadata → sun_elevation | The estimated sun elevation measured at the target at the moment of the capture. Value in degrees. | 39 |
| metadata → frame_index | Internal assigned index to the individual frame in the capture. | 195 |
| metadata → exposure_sec | Exposure time in seconds. | 0.0018245 |
| metadata → binning | Low level configuration for sensor binning. | [1, 1] |
| metadata → subsampling | Sensor level configuration for subsampling. |
[1, 1] |
| metadata → off_nadir | Offnadir expressed in degrees. In case this angle cannot be computed, a value of -1 will be reported. |
24.9490357122 |
| metadata → viewing_azimuth | Viewing Azimuth in degrees. In case this angle cannot be computed, a value of -1 will be reported. |
166.1138701133 |
| metadata → payload | Options are MS for multispectral and HS for hyperspectral. |
"MS" |
| metadata → sun_azimuth | The estimated sun azimuth measured at the target at the moment of the capture. Value in degrees. | 72.333 |
| metadata → gsd | Ground Sampling Distance (in meters). Greatest value from metadata -> gsd_x and metadata -> gsd_y reported. | 1.024893091 |
| metadata → gsd_x | Ground Sampling Distance in x direction (in meters). Average value at the center of the frame. | 1.024893091 |
| metadata → gsd_y | Ground Sampling Distance in y direction (in meters). Average value at the center of the frame. | 1.015058561 |
| metadata → incidence_angle | Incidence Angle in degrees. In case this angle cannot be computed, a value of -1 will be reported. | 26.55467459 |
| metadata → product_version_L0 | Product Version aligned with ICD version. | "1.0.0" |
| metadata → software_version_L0 | Internal software version used to process the product. | "0.6.1" |
| metadata → sensor_position | Sensor position for the frame, in millimeters. |
{
"pos_x": 0.0,
"pos_y": 0.0,
"pos_z": 0.0
}
|
| metadata → nss_version | Internal satellite specs database version. | "0.71.0" |
| metadata → last_modified | Timestamp when the product was last processed. | "2024-09-02T14:34:07.826922+00:00" |
| metadata → image_dimensions | Dimension of frame in pixels. |
{
"height": 5120,
"width": 5120
}
|
| metadata → valid_pixel | Percentage of pixels that are valid, from 0 to 100. | 100 |
| metadata → product_metadata → satellite_serial_number | Internal satellite serial number. Format: FM<sat_id> | "FM32" |
| metadata → product_metadata → time_range | Start and end timestamps, in Unix time format, for the entire associated capture. |
[
1725281465.564875,
1725282199.607398
]
|
| metadata → product_metadata → rois | Internal data describing the captured ROIs by the sensor. |
[
{
"bitmask": "MSB",
"coord": [0, 0, 5119, 5119],
"roi_id": 0
}
]
|
| metadata → product_metadata → category | Internal identification of the capture. Possible values: (production, engineering, no_process) | "production" |
| metadata → product_metadata → bands | Position and information of each of the bands present on the raw frame. |
"blue": {
"band_field_of_view": {
"x_fov": 0.6286165523911111,
"y_fov": 0.13652765747244444
},
"band_indices": {
"y_max": 5075,
"y_min": 45
},
"center_of_band": {
"cob_x_px": 2560,
"cob_y_px": 1899
}
}
|
| metadata → product_metadata → satellite | Internal satellite serial number. Format: FM<sat_id> | FM32 |
| metadata → camera | Internal camera name. | micro |
| metadata → satellite_model | Satellite generation category, mainly to differentiate between MarkIV and MarkV. | MarkIV |
| metadata → satellite_attitude_calculated_ecef2body | The estimated satellite attitude with respect to ECEF. Same as metadata → telemetry → satellite_attitude_calculated_ecef2body. | [0.27514077557430466,
0.7782452895749822,
-0.5617941488731234,
0.054946857623027784] |
| metadata → satellite_position_calculated_ecef | The position of the satellite with respect to ECEF. Values are X/Y/Z positions in meters. See also: metadata → telemetry → satellite_posvel. | [3877487.1114285714,
1638382.3979910715,
5301508.870535714] |
| metadata → source_frame_type | Reserved for future internal use. | standard |
| metadata → satellite_generation | Satellite generation category, mainly to differentiate between MarkIV and MarkV. Same as metadata → model. | MarkIV |
| Attachments | Reserved for internal use. | [{"file_name":
"20240902_125109_614_SN30_L0_MS_thumbnail.tiff",
"metadata": {},
"url": "../image_20240902-125109-614_0221_thumbnail.tiff",
"source": "internal"}] |
| Rasters | Reserved for internal use. | [{"file_name": "20240902_125109_614_SN30_L0_MS_analytic.tiff",
"bands": ["raw"],
"url": "../image_20240902-125109-614_0221.tiff",
"source": "internal"}] |
Packaging specification
STAC API
The L0 product can be found in our STAC archives. Each frame of a capture is a single Item in the corresponding collection. The following metadata and assets are available for each.
The following table shows the description of each field and an example corresponding to the capture used in previous section. (see STAC Common Metadata)
| prefiex | Field | Description | Example |
|---|---|---|---|
| General | GSD | Ground Sampling Distance (GSD) | 1,0248930914 m |
| General | Time of Data | Timestamp of capture | 2024-09-02 12:51:09 UTC |
| General | Platform | The name of the satellite that took this frame. Format: newsat |
newsat30 |
| General | Instruments | Name of instrument or sensor used. Values are either ms for multi-spectral instrument or hs for hyper-spectral instrument. | ms |
| projection | Image Dimensions | Dimension of Image in Pixels. (Height x Width) | 5 120 × 5 120 |
| satl | Outcome Id | The UUID of the entire capture this individual frame is part of. | f1c8eeb1-f5fc-4a17-b107-2e5174c25b68 |
| satl | Nss Version | Internal satellite specs database version. | 0.71.0 |
| satl | Valid Pixel | Percentage of pixels that are valid, fro.m 0 to 100. | 100 |
| satl | Exposure Sec | Exposure time of capture in seconds | 0,0018245 |
| satl | Product Name | The product name | L0 |
| satl | Last Modified | Timestamp when the product was last processed. | 2024-09-02T14:35:03.469570+00:00 |
| satl | Transaction Id | Internal processing transaction identifier. | l0-pipeline-zf7jd |
| satl | Product Version | Product Version aligned with ICD version | 1.0.0 |
| satl | Software Version | Internal software version used to process the product. | 0.6.1 |
| satl | Satellite Altitude | Satellite Altitude in meters. | 404433,6368833203 |
| satl | Satellite Generation | Satellite generation category, mainly to differentiate between MarkIV and MarkV. | MarkIV |
| View Geometry | Viewing Azimuth | Viewing Azimuth in degrees | 166,1138701133 ° |
| View Geometry | Off-Nadir Angle | Off Nadir Angle in degrees | 24,9490357122 ° |
| View Geometry | Sun Azimuth | Sun Azimuth in degrees | 226,5904288815 ° |
| View Geometry | Sun Elevation | Sun Elevation in degrees | 39 ° |
| View Geometry | Incidence Angle | Incidence angle in degrees | 26,5546745895 ° |
Non documented parameters should be ignored.
Also, each item/tile contains the following assets/components:
| STAC Item asset name | Component |
|---|---|
| preview | A small preview of the raster |
| analytic | The full resolution raster corresponding to the frame |
| thumbnail | A smallthubmnail of the raster. |
| metadata | The JSON Metadata file describe above |
Packaged scene
If delivered as a package scene (via S3, FTP, or Zip download link) an L0 capture is packaged in the following format:
Scenes are delivered as a single folder. The file name follow the following format:
{date_hour_ms}_SN{sn}_{product_name}_{payload}, for example like "20240902_125109_614_SN30_L0_MS".
Inside each package, a flat structure can be found with all corrsponding frames and their associated ancilliary files.
The following files and folders can be found in a typical scene:
.
├── {date_hour_ms}_SN{sn}_{product_name}_{payload}_preview.png
├── {date_hour_ms}_SN{sn}_{product_name}_{payload}_anaytic.tiff
├── {date_hour_ms}_SN{sn}_{product_name}_{payload}_metadata.json
├── {date_hour_ms}_SN{sn}_{product_name}_{payload}_thumbnail.png
| File | Description |
|---|---|
| *_analytic.tiff | The full resolution raster for the individual frame |
| *_preview.png | The preview component of the product for the entire scene |
| *_thumbnail.png | A low resolution thumbnail of the scene |
| *_metadata.json | The metadata JSON attachment |
| *.json | A STAC metadata dump of the item in the archive. |
Changelog
[ICD 1.0.0] 03-09-2024
- Initial release